

行業(yè)資訊
簡(jiǎn)述沖床機(jī)械手的運(yùn)功控制方法
沖床機(jī)械手其運(yùn)動(dòng)控制方式為:
(1)由伺服電機(jī)驅(qū)動(dòng)可旋轉(zhuǎn)角度為360°的氣控機(jī)械手(有光電傳感器確定起始0點(diǎn));
(2)沖床機(jī)械手廠家介紹,由步進(jìn)電機(jī)驅(qū)動(dòng)絲杠組件使機(jī)械手沿X、Y軸移動(dòng)(有x、y軸限位開(kāi)關(guān));
(3)可回旋360°的轉(zhuǎn)盤(pán)機(jī)構(gòu)能帶動(dòng)機(jī)械手;
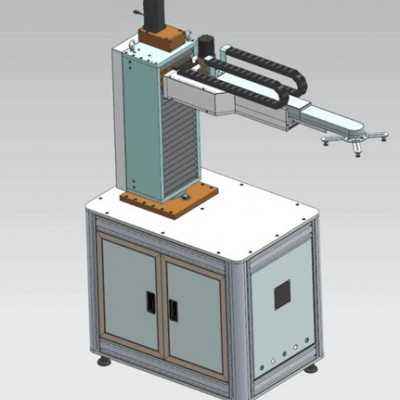
及絲杠組自由旋轉(zhuǎn)(其電氣拖動(dòng)部分由直流電動(dòng)機(jī)、光電編碼器、接近開(kāi)關(guān)等組成);
(4)旋轉(zhuǎn)基座主要支撐以上3部分;
(5)氣控機(jī)械手的張合由氣壓控制(充氣時(shí)機(jī)械手抓緊,放氣時(shí)機(jī)械手松開(kāi))。
沖床機(jī)械手其工作過(guò)程為:當(dāng)貨物到達(dá)時(shí),機(jī)械手系統(tǒng)開(kāi)始動(dòng)作;步進(jìn)電機(jī)控制開(kāi)始向下運(yùn)動(dòng),同時(shí)另一路步進(jìn)電機(jī)控制橫軸開(kāi)始向前運(yùn)動(dòng);伺服電機(jī)驅(qū)動(dòng)機(jī)械手旋轉(zhuǎn)到達(dá)正好抓取貨物的方位處,然后充氣,機(jī)械手夾住貨物。
步進(jìn)電機(jī)驅(qū)動(dòng)縱軸上升,另一個(gè)步進(jìn)電機(jī)驅(qū)動(dòng)橫軸開(kāi)始向前走;轉(zhuǎn)盤(pán)直流電機(jī)轉(zhuǎn)動(dòng)使機(jī)械手整體運(yùn)動(dòng),轉(zhuǎn)到貨物接收處。
所屬類(lèi)別: 行業(yè)資訊
| 關(guān)于我們 | 新聞資訊 | 產(chǎn)品視頻 | 聯(lián)系方式 | ? | ? | ||
| 公司簡(jiǎn)介 | 企業(yè)動(dòng)態(tài) | 沖壓機(jī)械手 | 工程案例 | 招賢納士 | 聯(lián)系我們 |
? ? |
???????????????????????? ???? ?? 手機(jī)網(wǎng)站?????????????????????????? 微信公眾號(hào) |
| 行業(yè)新聞 | 鍛壓機(jī)械手 | ? | ? | 在線留言 | |||
| 相關(guān)知識(shí) | 相關(guān)知識(shí) | ? | ? | 網(wǎng)站地圖 | |||
| ? | 智能鍛造 | ? | ? | ? | ? | ? | |
| ? | ? | ? | ? | ? | ? |
 ??????????????
?
??????????????
?